
技术引领未来,守护美好生活
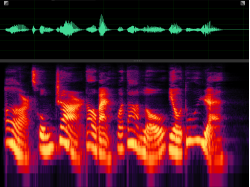
下面两段音轨,左边的是在消声室中录制的直达声信号,没有混响;右边模拟房间环境处理后得到的有混响的信号;混响声听起来像是无混响声的延续和拖尾。
混响时间是度量房间内混响程度的基本指标之一。混响时间用来描述房间内声音衰减快慢的程度。它的定义为:声源停止后声音在房间内较初始声压级衰减60dB所经过的时间,一般用T60表示。计算混响时间有一个有名的公式,叫“塞宾公式”,定义如下:

 为平均吸声系数。一般的,房间越大,室内越空旷,混响时间会越长。因此,像银行营业大厅、金库,这种空间较大、壁面光滑的空间里,混响时间明显较长。
为平均吸声系数。一般的,房间越大,室内越空旷,混响时间会越长。因此,像银行营业大厅、金库,这种空间较大、壁面光滑的空间里,混响时间明显较长。混响影响拾音音质和语音识别率,因此需要从拾音信号中去除混响声,这种技术就是去混响技术。一般去混响主要有三种技术:第一种方法,麦克风拾取的信号可以看作声源信号与房间冲击响应的卷积生成的信号,通过这种数学模型来消除混响,在估计房间声学模型参数之后,形成对原始信号的估计。第二种方法,通过将混响视为一种噪声,通过适用于混响的降噪过程来抑制混响,事实上,一般的语音降噪算法都具有一定的去混响效果;第三种方法,采用深度学习的方法去混响,经过神经网络后,得到频域的滤波系数。混响信号经过滤波后,输出去混响信号。这样的网络经过大量数据训练后,用于去混响处理,就能得到较清晰的信号。
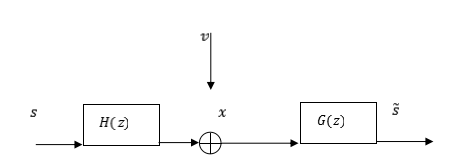
上图为混响产生与去混响的过程模型, 为语音信号,经过房间响应
为语音信号,经过房间响应 卷积后,形成混响信号,加上引入的房间噪声或其他噪声
卷积后,形成混响信号,加上引入的房间噪声或其他噪声 ,形成麦克风处拾取的信号
,形成麦克风处拾取的信号 。信号经过滤波器
。信号经过滤波器 后,获得去混响的信号
后,获得去混响的信号 。‘理想情况下,
。‘理想情况下, 和
和 关系如下:
关系如下:

 ,从而估计逆滤波器
,从而估计逆滤波器 ,经逆滤波后形成去混响的信号;
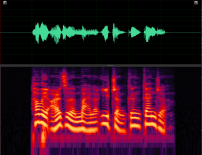
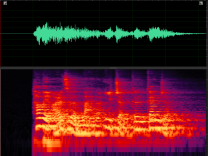
,经逆滤波后形成去混响的信号;下图左边为去混响前的信号,右图为去混响后的信号

 金融
金融
 教育
教育
 司法
司法
 公安
公安
 交通
交通
 平安城市
平安城市
 智慧建筑
智慧建筑
 景区
景区
 工业
工业
 政务及其他
政务及其他



